 400 025 3599
400 025 3599 




将stewart平台铰接点参数带入到上述公式中,使用matlab求得在初始位姿下,如图2.22.1所示,六根杆长和设计时的参数一致。
平台参数为:
l xa 上平台x轴坐标
l ya 上平台y轴坐标
l za = 上平台z轴坐标
l xb = 下平台x轴坐标
l yb = 下平台y轴坐标
l zb = 下平台z轴坐标
l roumin = 最小杆长
l roumax = 最大杆长
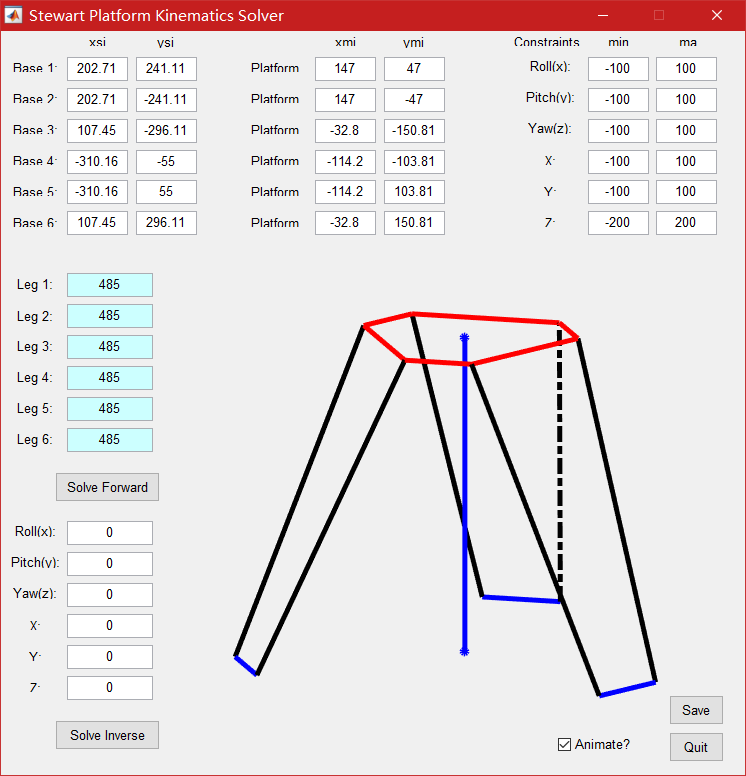 图2.22.1 初始姿态下平台各参数
图2.22.1 初始姿态下平台各参数
通过修改对应位姿参数,反解得各杆长,如图2.22.2所示。
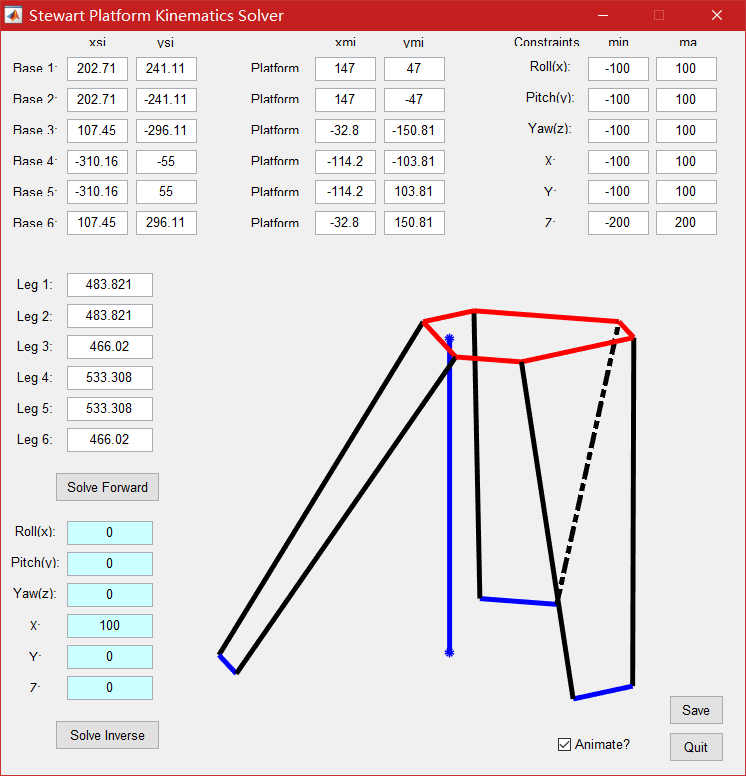
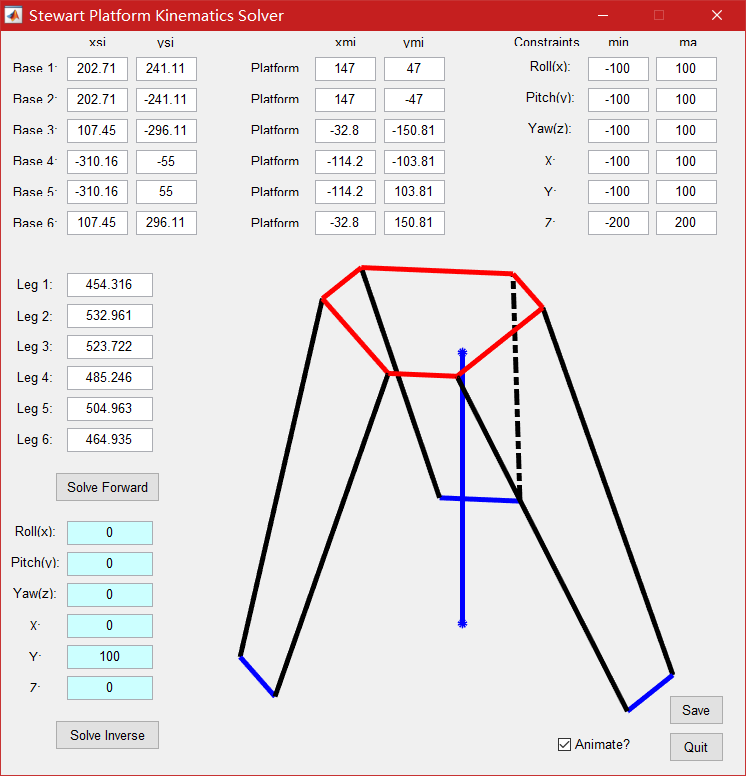
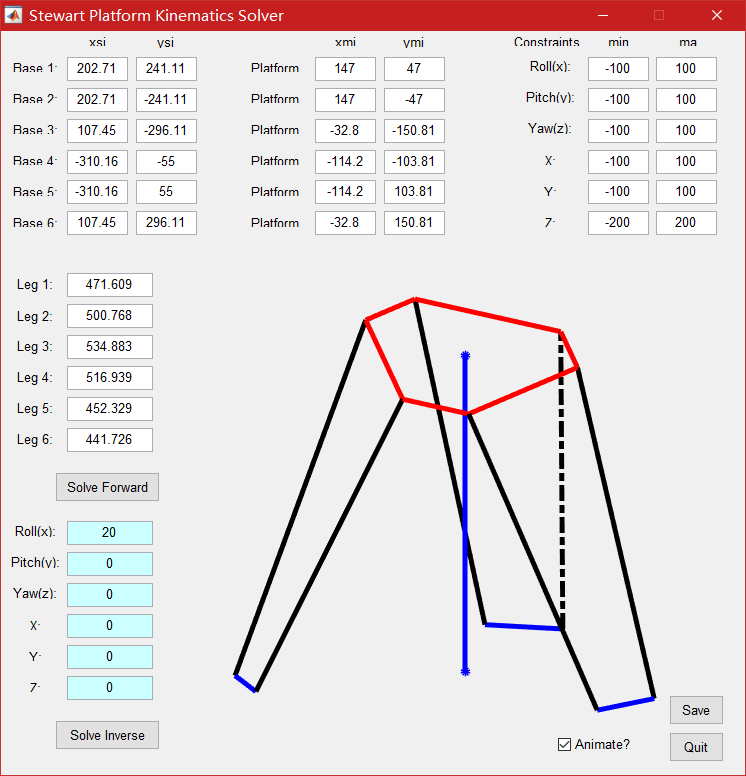
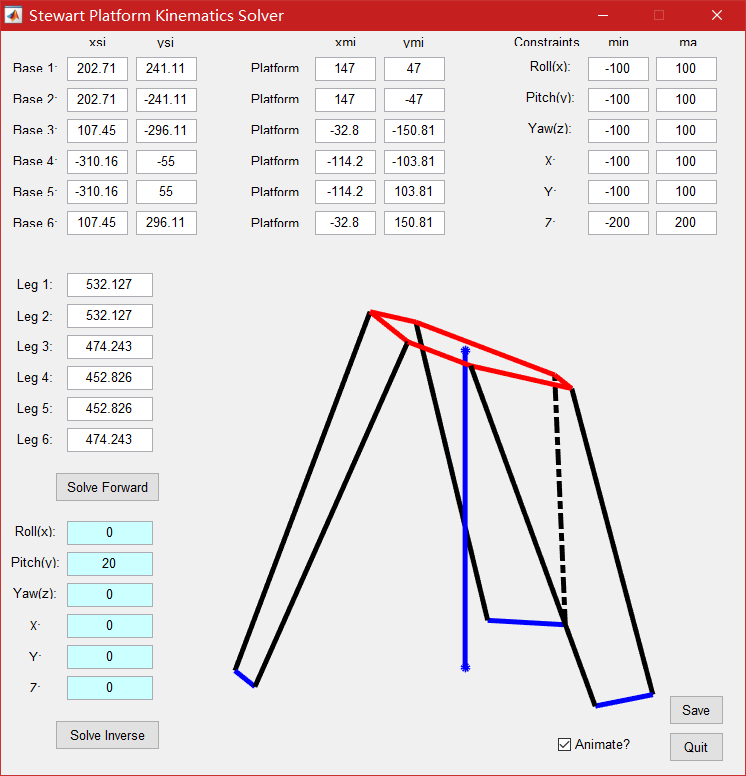
图2.22.2 不同姿态下平台各参数
利用matlab计算stewart平台工作空间,得到工作范围,如图2.22.3所示。
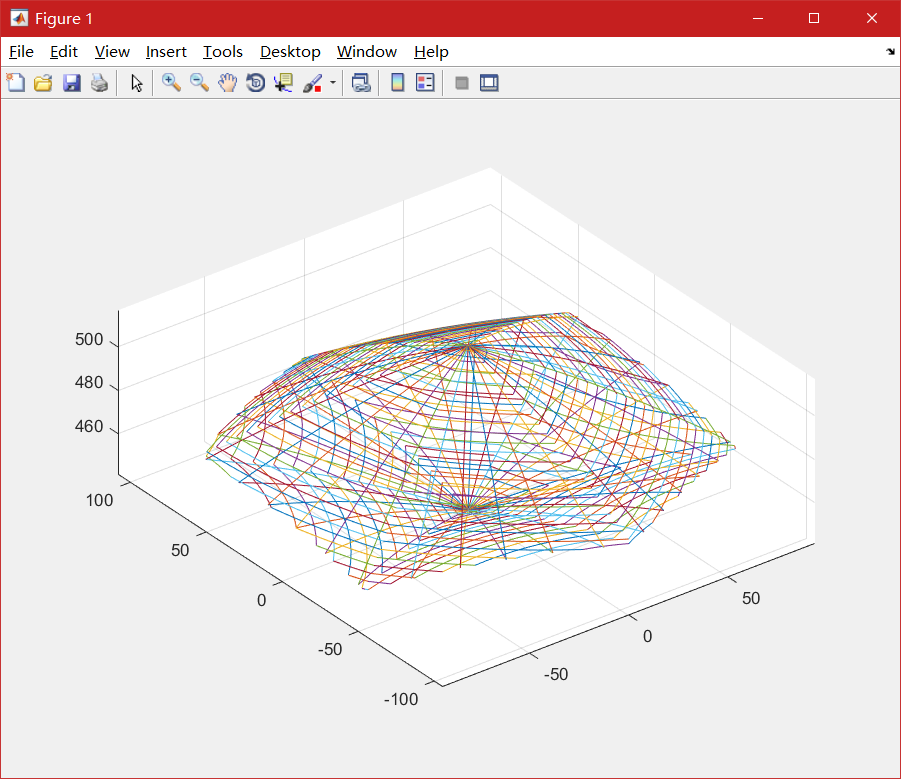 图2.22.3 平台工作空间
图2.22.3 平台工作空间
平台参数为:
l xa 上平台x轴坐标
l ya 上平台y轴坐标
l za = 上平台z轴坐标
l xb = 下平台x轴坐标
l yb = 下平台y轴坐标
l zb = 下平台z轴坐标
l roumin = 最小杆长
l roumax = 最大杆长
通过修改对应位姿参数,反解得各杆长,如图2.22.2所示。
图2.22.2 不同姿态下平台各参数
利用matlab计算stewart平台工作空间,得到工作范围,如图2.22.3所示。
关键词: matlab,运动学,仿真,软件,将,stewart,平台,







