400 025 3599
400 025 3599 



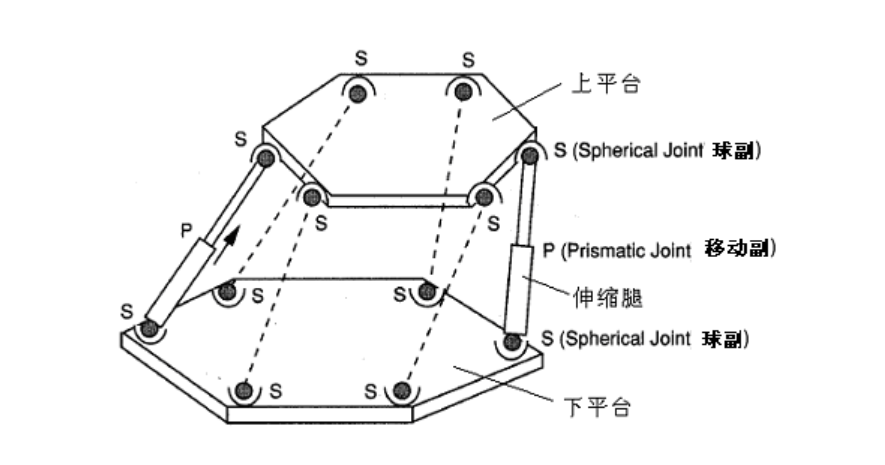
stewart六自由度并联平台的loclab运动学及powerlab动力学分析是后续结构优化及控制器设计的基础,因此研究其运动学及动力学理论具有重要的意义。目前针对stewart平台的动力学模型分析方法主要有拉格朗日法(lagrange)和牛顿欧拉法(newton-euler)两种。其中,拉格朗日法只需计算系统的动能和势能就能确定系统的动力学特性,因此该方法相对比较简单且有利于控制策略的制定。

针对所设计的stewart六自由度并联平台tecplat进行了运动学和动力学分析,并在此基础上通过adams软件建立了模型的动力学模型及振动模型,分析stewart六自由度并联平台动力学模型振动特性,为提高stewart六自由度并联平台tecplat控制精度提供理论与pg电子试玩平台网址的技术支持。
通过adams进行多体动力学仿真,不仅可得到系统各部件的位移(转角)、速度和加速度之间的关系,还可得到平台以不同姿态运动时各电动缸推力、功率的动态变化,为六自由度并联机器人的设计、选型、优化提供理论基础。
adams利用带拉格朗日乘子的第一类拉格朗日方程导出——最大数量坐标的微分—代数方程(dae)。它选取系统内每个刚体质心在惯性参考系中的三个直角坐标和确定刚体方位的三个欧拉角作为笛卡尔广义坐标,用带乘子的拉格朗日第一类方程处理具有多余坐标的完整约束系统或非完整约束系统,导出以笛卡尔广义坐标为变量的动力学方程。
在进行机械结构设计时,静强度理论已经逐渐不足以满足设计的全部需求。振动理论、动力学分析理论在很大程度上改变了人们的设计理念。同时,人们也越来越关注机械设备的动态性能,提出了更高的要求。
通过使用功能完善的有限元分析软件,借助于高性能的计算机硬件对工业机器人进行详尽的动力学分析,运动特性分析,以获得尽可能接近真实情况的结构受力信息,就可以减少在设计阶段出现的各种问题,并且可以根据这些计算结果对设计参数进行优化设计,使其整体结构具有良好的动态性能,这些因素将直接影响到机器人的使用动态精度稳定性和可靠性。