400 025 3599
400 025 3599 



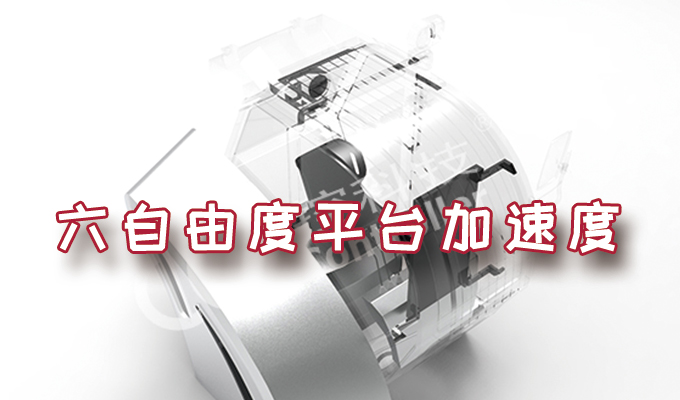
本文采用的stewart并联机器人平台如图1所示,主要包含上平台、下平台以及六个支杆。其中六个支杆的两端采用上、下两个卧式虎克铰将上、下平台连接在一起。每个支杆均采用电动缸,通过控制电动缸的中伺服电机实现支杆的长度控制,进而实现stewart并联机器人末端位姿的调整。

由上可知,stewart并联机器人具有上平台、下平台和6个支杆组成,为了便于描述,将机器人抽象为如图2所示的结构简图,该图中将上平台卧式虎克铰的回转中心定义为ai(i=1,2,…,6),分布在半径为ra的圆周上,六个上平台卧式虎克铰的回转中心点连线组成了一个六边形。以此类推,将下平台卧式虎克铰的回转中心定义为bi(i=1,2,…,6),分布在半径为rb的圆周上,六个下平台卧式虎克铰的回转中心点连线也组成了一个六边形。序号对应的回转中心进行连线,分别代表电动缸的长度li(i=1,2,…,6),此长度包含电动缸的本体长度。

为了描述stewart并联机器人的结构,目前主要包含两种描述参数。
第一类结构描述参数如下:
(1)上平台卧式虎克铰回转中心点分布圆半径ra;
(2)下平台卧式虎克铰回转中心点分布圆半径rb;
(3)上平台卧式虎克铰回转中心点的六边形短边长度da;
(4)下平台卧式虎克铰回转中心点的六边形短边长度db;
(5)上平台工作零位时,上、下平台卧式虎克铰回转中心点距离l。
第二类结构描述参数如下:
(1)上平台卧式虎克铰回转中心点分布圆半径ra;
(2)下平台卧式虎克铰回转中心点分布圆半径rb;
(3)上平台卧式虎克铰回转中心点的六边形短边中心角φa;
(4)下平台卧式虎克铰回转中心点的六边形短边中心角φb;
(5)上、下平台卧式虎克铰回转中心点的最短距离lmin。
以上两种结构描述参数均采用五参数,其中前四个参数描述的物理意义相同,区别在于第五个参数的定义,一种时以实际的工作状态定义,一种是以机器人的物理结构定义。本文采用第二种结构描述参数,图1中的stewart并联机器人的结构描述参数如表2.1所示。根据以上定义可以计算得到上平台卧式虎克铰的回转中心点ai(i=1,2,…,6),下平台卧式虎克铰的回转中心点bi(i=1,2,…,6)的坐标如下式所示。